はじめに
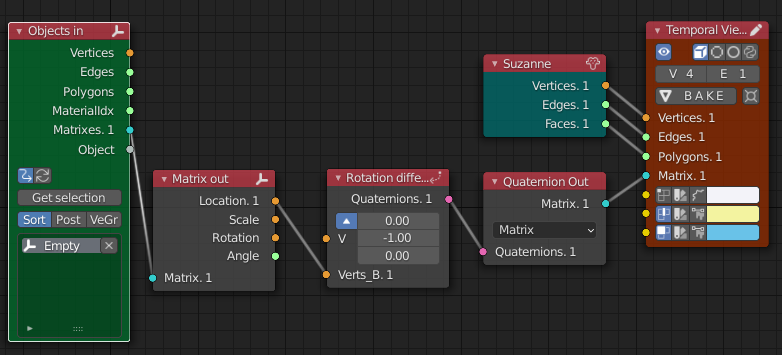
オブジェクトの回転をノードから行えるものにMatrix Track To やMatrix Normalがあります。Rotation differenceも似たような事が出来そうなので理解の為にノードを見てみます
Rotation difference
参照元

http://nikitron.cc.ua/sverch/html/nodes/quaternion/rotation_difference.html
nikitron.cc.ua
機能
最初のポイントが二番目に与えられたポイントに回転するためにクォータニオン(四元数)を作成する。これは normal matrix ノードの代替となります。Normal matrixノードが限られた数の軸のみで動作するのに対し、このノードは任意の軸で動きます。
カテゴリ
Quaternions -> Rotation difference
入力
- Verts_A 頂点(回転の開始)
- Verts_B 頂点(回転の終了
出力
- Quaternions 与えられたポイント間の回転差
パラメータ
- Flat output すべてのQuaternionsをフラットなリストで出力する
使用例
- 最初のベクトル = スザンヌの正面(スザンヌはデフォルトで-Y方面へ向いている為)
- 2番目のベクトルは回転しているEmpty
まだ使用例は公式にもありますので見てみてください
最後に
🤔機能的には Matrix Track To > Rotation difference > Matrix Normal でよさそうですね。特に複数オブジェクトの位置、回転、スケールを一気に決めたいときはMatrix Track Toが使えそうです。こちらのノードはMatrix Normalで思うように制御できない場合に使えそうですね

